When it comes to legged robots, it is easy to think that complexity and processing costs will keep these creatures away from becoming anyone’s garage hobby. However, through a series of clever design choices, [Damian Lickindorf] Found a way to overcome difficulties and bring life to life Stanley, a low-cost, energetic quadruped with some serious kicks!
It seems that building a legged robot is not a tricky task. [Damian] Some classic design choices have been made to keep prices low and reduce manufacturing complexity without sacrificing performance. Following the latest trend of collimating legged robots started from the MIT Mini Cheetah, [Damian] A small transmission with a gear reduction ratio of less than 1:9 is constructed. This choice slightly reduces the heat generated by the motor running at low speed and high torque without sacrificing too much control bandwidth (think: “leg responsiveness”).
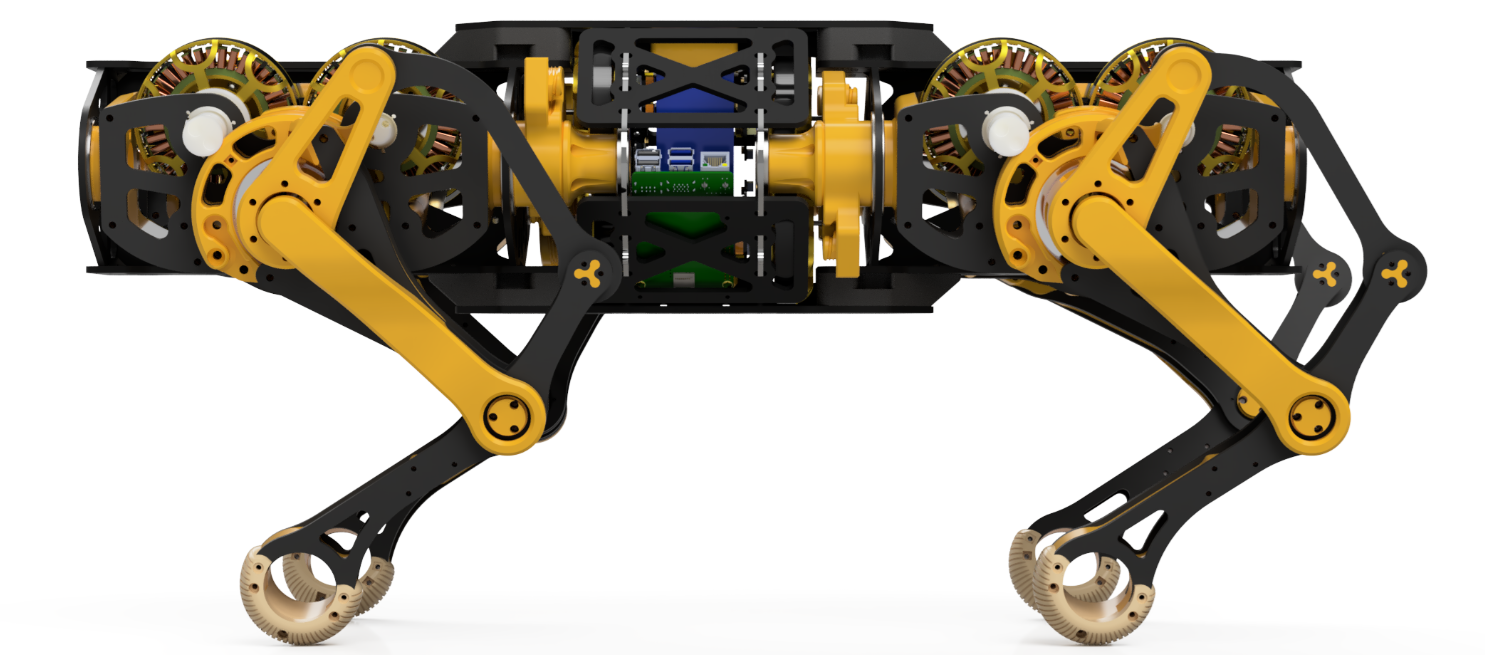
However, unlike the cheetah that uses planetary gearboxes, [Damian] Choose the winch drive, which is a cable-driven transmission that can be driven back and without backlash: two must-haves for force-sensitive dynamic legged robots. For the legs, he chose FR4 which was processed in two dimensions (think: circuit board material).For the motor, he chose a set of brushless motors with a large clearance radius, Moteus driverThe result is high-fidelity, dynamic construction, which is only a small part of the biological costs that we see in academic research laboratories.
If you want to feast your eyes on some action shots, then look no further [Damian’s] YouTube and Instagram Present. If you want to follow this project, Check out the Hackaday.io projectAlthough we are eager to see the project continue to unfold, we are excited about its progress. In the meantime, be sure to check out one of the inspirations for this project: Mjbots Quad A0.
Finally, since we didn’t see many winch drives on Hackaday, if you are curious about these mechanisms and you can pass the paywall, These two Research The thesis may be a good place to dig deeper.