Flying a thrust vector rocket can be a challenge, especially if you stack multiple stages and a minimalist flight computer on top of it all.but [Joe Barnard] Will not evade such a challenge, So he built a three-stage active guided rocket, named Shrek.
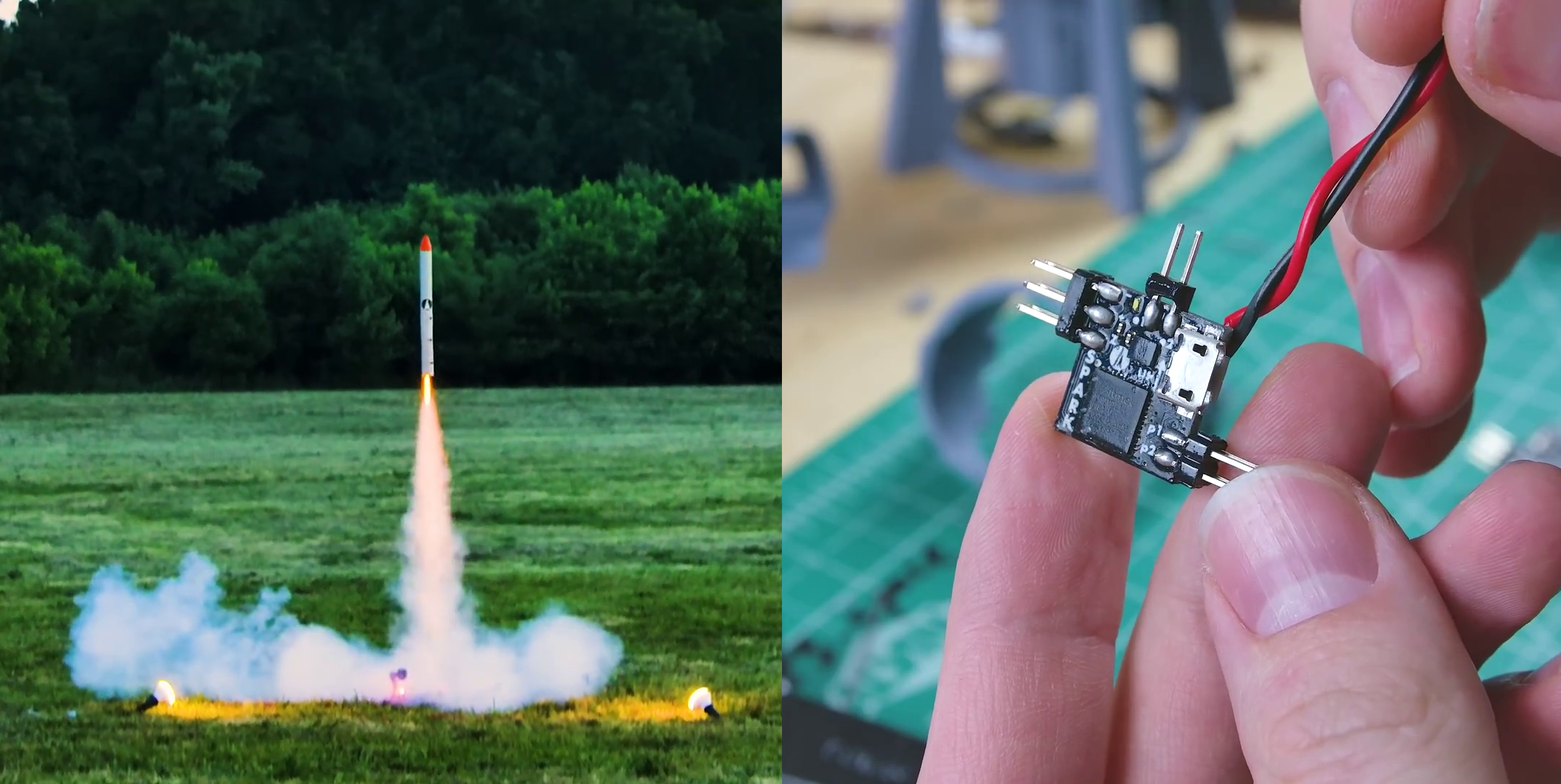
[Joe] Known for his thrust vector rockets, some of which have achieved perfect powered landings. Previous rockets used larger and more complex flight computers, but in this round, he wanted to be as small and simple as possible. Each stage of the rocket has its own miniature 16 x 17 mm flight computer and battery. The main components are the SAM21 microcontroller running the Arduino firmware, the IMU for height and direction sensing, and the FET for triggering the rocket engine igniter. It also has a servo output for thrust vector control (TVC) and a motor control output for the third stage reaction wheel for roll control. For the sake of simplicity, he omitted a method of recording flight data, which he later regretted the decision. Shrek There is no special recovery system at any stage, but rely on its light weight and high resistance to land intact.
None of the four launch attempts proceeded as planned. Only the first two phases ran normally during the test and achieved the best results. Due to the lack of recorded flight data, [Joe] After each launch, I had to rely solely on video clips to diagnose the problem. Even so, his experience in diagnosing the problem certainly proved its value and brought definite improvements. However, we suspect that all his future flight computers will include data logging capabilities.
thanks for your reminder [BaldPower]!