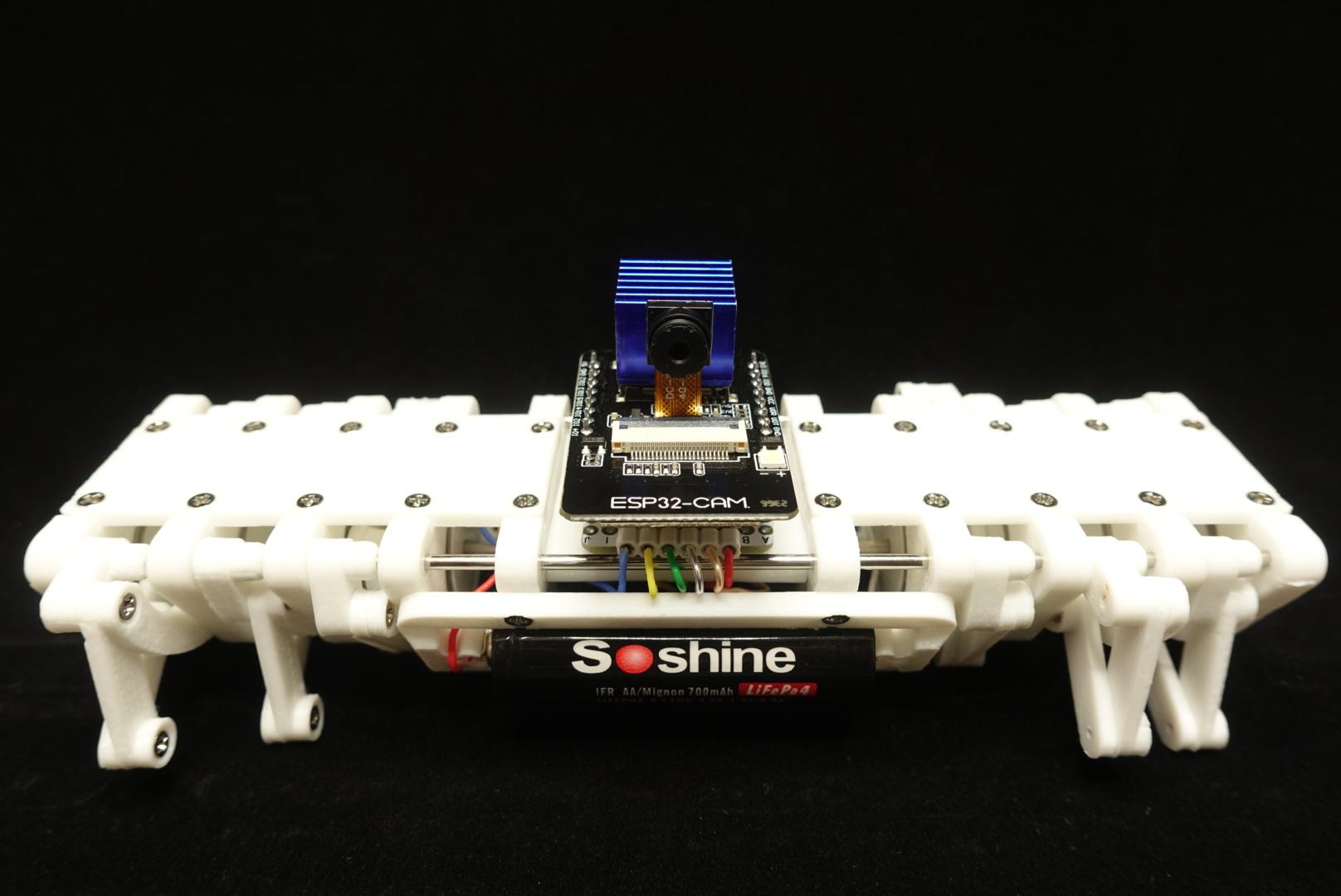
Wheels may be the easiest way to move a robot, but the viewing experience for pedestrians is much more satisfying.Of course it is [Chen Liang’s] Mini Strider Walker controlled by ESP32 camera board.
The Strider mechanism may look similar to the Strandbeest walker, but it raises its feet higher, allowing it to traverse more rugged terrain. [Chen]This small 3D printed version is driven by a pair of N20 gear motors, with three legs on each side. The ESP32 camera board allows WiFi to be used for control and FPV video feed. The power source comes from a 14500 LiFePO4 battery. The required width of the motors, leg mechanisms, and bearings means that the robot is so wide that it may get stuck on objects outside the camera’s field of view. [Chen] Yes Try to make it narrower By using continuous rotation servo system and line drive shaft.
We have not seen a shortage of multi-legged walkers or improvisations, such as the TrotBot and Strider mechanisms developed by [Wade] with [Ben Vagle], And their website It is an excellent resource for potential builders.
thanks for your reminder [Thinkerer]!